Overview
The TurtleBot 4 runs on Ubuntu 24.04 (Noble Numbat) with ROS 2 Jazzy or Ubuntu 22.04 (Jammy Jellyfish) with ROS 2 Humble. TurtleBot 4 was previously available on Ubuntu 20.04 (Focal Fossa) with ROS 2 Galactic, but this distribution is now past its end-of-life date and is no longer supported. The TurtleBot 4 software is entirely open source under the Apache 2.0 license, and is available on the TurtleBot Github.
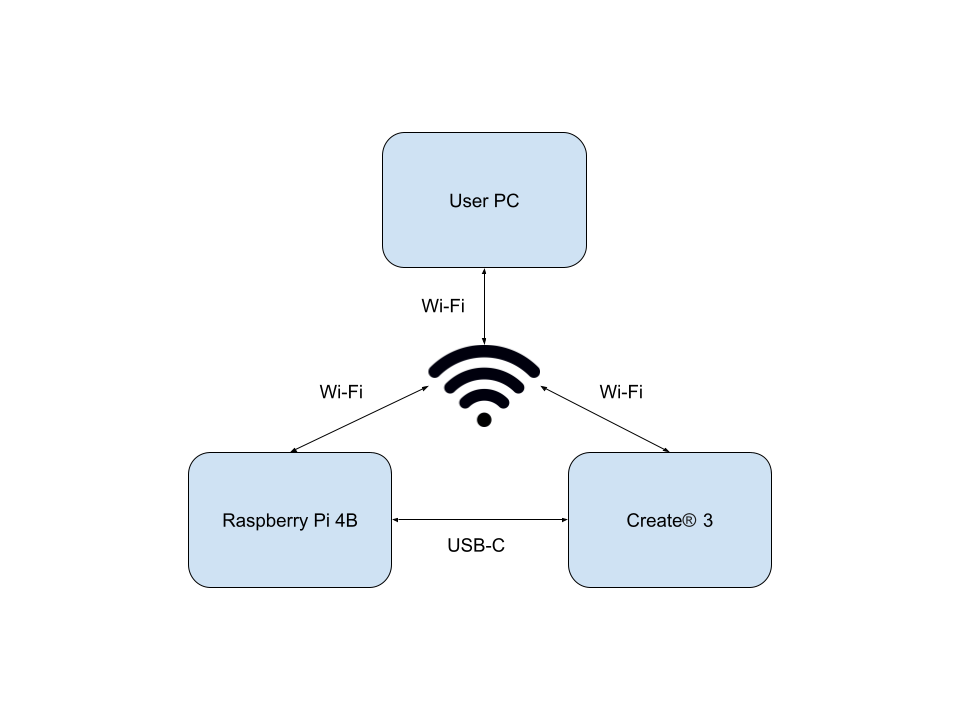
There are 2 main computers that run software used by TurtleBot 4: the onboard Raspberry Pi 4B, and the Create® 3 onboard processor. The user can also connect to the robot with their own PC to visualise sensor data, configure and control the robot, and more. Each computer is required to run the same version of Ubuntu and ROS 2 as the Turtlebot 4.
Create® 3
The Create® 3 exposes ROS 2 topics, actions, and services over the USB-C cable powering the Raspberry Pi. This gives users access to the battery state, sensor data, docking actions, and allows velocity commands to be sent from the Raspberry Pi to the Create® 3.
Raspberry Pi 4B
The Raspberry Pi 4B on both the TurtleBot 4 and TurtleBot 4 Lite comes preinstalled with Ubuntu 24.04 Server, ROS 2 Jazzy, and TurtleBot 4 software. The latest TurtleBot 4 images can be found here. The purpose of the Raspberry Pi 4B is to run the TurtleBot 4 ROS nodes, run sensor ROS nodes, use Bluetooth to connect to the TurtleBot 4 controller, access GPIO, and connect the robot to your network over WiFi.
User PC
The user's PC is used to configure the robot, visualise sensor data, run the TurtleBot 4 simulation, and run additional software. The PC is required to run Ubuntu 24.04 with ROS 2 Jazzy installed, Ubuntu 22.04 with ROS 2 Humble installed, or to use a Virtual Machine running Ubuntu 24.04 or 22.04. This version must match the version running on the robot. A typical laptop or desktop will offer significantly higher processing performance than the Raspberry Pi can, so running applications such as Nav2 or SLAM on the PC will provide significant performance improvements.