ROS 2 Tests
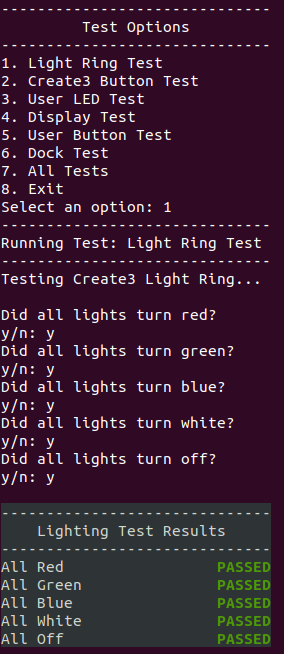
Both TurtleBot 4 models have the turtlebot4_tests package installed by default. This package provides some tests that can be run from CLI to test basic system functions.
Each test uses a ROS 2 topic, action, or service to perform the action. To run Create® 3 tests, the Create® 3 must be connected to the Raspberry Pi over either WiFi or USB-C.
To run the tests, call
ros2 run turtlebot4_tests ros_tests
Test results are saved to ~/turtlebot4_test_results/Y_m_d-H_M_S where Y_m_d-H_M_S is the date and time of the test. A rosbag is also recorded for the duration of the test and saved to the same location.