TurtleBot 4 Robot
The turtlebot4_robot repository contains packages that are used only by the physical robot, not the user computer.
Source code is available here.
Installation
The turtlebot4_robot metapackage is pre-installed on the TurtleBot 4 Raspberry Pi image.
If a robot computer needs to be set up from scratch without using the provided Raspberry Pi image, please refer to the instructions in the Readme file on the TurtleBot 4 setup repository.
Source installation
Source installation is an alternative to the debian package and should only be used if the debian package cannot be used or if modifications are being made to the source code.
To manually install this metapackage from source:
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
Clone the repository into your workspace:
cd ~/turtlebot4_ws/src git clone https://github.com/turtlebot/turtlebot4_robot.git -b galacticInstall dependencies:
cd ~/turtlebot4_ws rosdep install --from-path src -yiBuild the packages:
source /opt/ros/galactic/setup.bash colcon build --symlink-installNext, the workspace must be sourced.
-
Clone the repository into your workspace:
cd ~/turtlebot4_ws/src git clone https://github.com/turtlebot/turtlebot4_robot.git -b humbleInstall dependencies:
cd ~/turtlebot4_ws rosdep install --from-path src -yiBuild the packages:
source /opt/ros/humble/setup.bash colcon build --symlink-installNext, the workspace must be sourced. Source the workspace on the robot by running the
turtlebot4-setuptool and underROS Setupset the workspace as the path to your workspace's setup.bash (/home/ubuntu/turtlebot4_ws/install/setup.bash). -
Clone the repository into your workspace:
cd ~/turtlebot4_ws/src git clone https://github.com/turtlebot/turtlebot4_robot.git -b jazzyInstall dependencies:
cd ~/turtlebot4_ws rosdep install --from-path src -yiBuild the packages:
source /opt/ros/jazzy/setup.bash colcon build --symlink-installNext, the workspace must be sourced. Source the workspace on the robot by running the
turtlebot4-setuptool and underROS Setupset the workspace as the path to your workspace's setup.bash (/home/ubuntu/turtlebot4_ws/install/setup.bash).
Base
The turtlebot4_base package contains the source code for the rclcpp node turtlebot4_base_node which runs on the physical robot. This node interfaces with the GPIO lines of the Raspberry Pi which allows it to read the state of the buttons, as well as write to the LEDs and display.
This node is only used on the standard TurtleBot 4 model.
Publishers:
| Topic | Message Type | Description |
|---|---|---|
| hmi/buttons | turtlebot4_msgs/msg/UserButton | Button states of the TurtleBot 4 HMI |
Subscribers:
| Topic | Message Type | Description |
|---|---|---|
| hmi/display | turtlebot4_msgs/msg/UserDisplay | The current information that is to be displayed |
| hmi/led/_[led] | std_msgs/msg/Int32 | Hidden topics indicating the state of each LED |
GPIO Interface
The TurtleBot 4 uses libgpiod to interface with the GPIO lines of the Raspberry Pi. The gpiochip0 device represents the 40-pin header of the Raspberry Pi and is used for reading and writing to these pins.
I2C Interface
The linux I2C drivers are used to read and write data on the I2C buses of the Raspberry Pi. The display's SSD1306 driver is connected to the i2c-3 device by default, but other buses are available too.
SSD1306
The SSD1306 is a driver for OLED displays. It receives commands over a communication bus (I2C for the TurtleBot 4) and controls how the physical display behaves. The TurtleBot 4 uses a modified version of this STM32 SSD1306 driver to write pixels, shapes and characters to the display.
Configuration
Do NOT change pin definitions if you are using the standard PCBA or do not know what you are doing.
The turtlebot4_base_node pin definitions can be set with ROS parameters. The default configuration is:
turtlebot4_base_node:
ros__parameters:
# GPIO definition for HMI. Do NOT change if you are using the standard PCBA.
gpio:
user_button_1: 13
user_button_2: 19
user_button_3: 16
user_button_4: 26
led_green_power: 17
led_green_motors: 18
led_green_comms: 27
led_green_wifi: 24
led_green_battery: 22
led_red_battery: 23
led_green_user_1: 25
led_green_user_2: 6
led_red_user_2: 12
display_reset: 2
The value for each GPIO device is the GPIO number, NOT the pin number.
Bringup
The turtlebot4_bringup package contains the launch and configuration files to run the robots software.
Launch files:
- Joy Teleop: Launches nodes to enable the bluetooth controller.
- OAKD: Launches the OAK-D nodes.
- RPLIDAR: Launches the RPLIDAR node.
- Robot: Launches the TurtleBot 4 nodes.
- Lite: Launches all necessary nodes for the TurtleBot 4 Lite.
- Standard: Launches all necessary nodes for the TurtleBot 4.
Config files:
- TurtleBot 4 Controller: Configurations for the TurtleBot 4 controller.
- TurtleBot 4: Configurations for the
turtlebot4_nodeandturtlebot4_base_node.
Robot Upstart
The robot uses the robot_upstart package to install the bringup launch files as a background service that launches when the robot starts. The launch files are located under the turtlebot4_bringup package.
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
Robot upstart commands:
Command Bash Description Stop sudo systemctl stop turtlebot4Kill all nodes launched by the service.
The service will start again on reboot if it is not uninstalled.Start sudo systemctl start turtlebot4Launch all nodes if the service is inactive Restart sudo systemctl restart turtlebot4Kill all nodes launched by the service, then launch again Install install.py model [ROS_DOMAIN_ID](v0.1.2)
install.py model --domain [ROS_DOMAIN_ID](v0.1.3)Install the service. Optionally, set the ROS_DOMAIN_ID. Uninstall uninstall.pyUninstall the service. The nodes will no longer be launched on boot. Status sudo systemctl status turtlebot4View the current status of the service, and recent logs. View Logs sudo journalctl -u turtlebot4 -rView the latest logs from the service. -
Use the TurtleBot 4 setup tool to manage
robot_upstart:turtlebot4-setupNavigate to ‘ROS Setup', then ‘Robot Upstart'. Use the various menu options to start, stop, uninstall, or reinstall the upstart job.
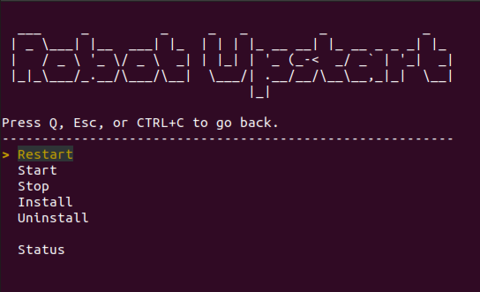
Manage robot_upstart with the TurtleBot 4 setup tool The setup tool will automatically reinstall the
robot_upstartjob when certain settings are changed. -
Use the TurtleBot 4 setup tool to manage
robot_upstart:turtlebot4-setupNavigate to ‘ROS Setup', then ‘Robot Upstart'. Use the various menu options to start, stop, uninstall, or reinstall the upstart job.
Manage robot_upstart with the TurtleBot 4 setup tool The setup tool will automatically reinstall the
robot_upstartjob when certain settings are changed.
Diagnostics
The turtlebot4_diagnostics packages contains the source code and launch files for the TurtleBot 4 diagnostics updater.
Launch files:
- Diagnostics: Launches the turtlebot4 diagnostics updater and the diagnostic aggregator node.
Diagnostics Updater
The diagnostics updater is a Python3 node that runs on the robot. It subscribes to diagnostic topics and records statistics specific to each topic. The diagnostic data is viewable with rqt_robot_monitor.
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
Diagnostic topics:
Topic Message Type Description battery_state sensor_msgs/msg/BatteryState Battery voltage and percentage color/preview/image sensor_msgs/msg/Image OAK-D color camera data dock irobot_create_msgs/msg/Dock Dock status hazard_detection irobot_create_msgs/msg/HazardDetectionVector Create® 3 Hazards imu sensor_msgs/msg/Imu IMU data mouse irobot_create_msgs/msg/Mouse Mouse sensor data scan sensor_msgs/msg/LaserScan RPLIDAR laser scan data wheel_status irobot_create_msgs/msg/WheelStatus Wheels enabled status -
Diagnostic topics:
Topic Message Type Description battery_state sensor_msgs/msg/BatteryState Battery voltage and percentage color/preview/image sensor_msgs/msg/Image OAK-D color camera data dock irobot_create_msgs/msg/DockStatus Dock status hazard_detection irobot_create_msgs/msg/HazardDetectionVector Create® 3 Hazards imu sensor_msgs/msg/Imu IMU data mouse irobot_create_msgs/msg/Mouse Mouse sensor data scan sensor_msgs/msg/LaserScan RPLIDAR laser scan data wheel_status irobot_create_msgs/msg/WheelStatus Wheels enabled status -
Diagnostic topics:
Topic Message Type Description battery_state sensor_msgs/msg/BatteryState Battery voltage and percentage color/preview/image sensor_msgs/msg/Image OAK-D color camera data dock irobot_create_msgs/msg/DockStatus Dock status hazard_detection irobot_create_msgs/msg/HazardDetectionVector Create® 3 Hazards imu sensor_msgs/msg/Imu IMU data mouse irobot_create_msgs/msg/Mouse Mouse sensor data scan sensor_msgs/msg/LaserScan RPLIDAR laser scan data wheel_status irobot_create_msgs/msg/WheelStatus Wheels enabled status
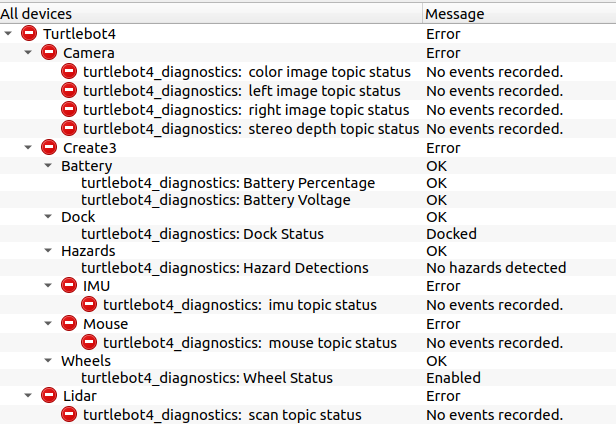
Viewing diagnostics:
ros2 launch turtlebot4_viz view_diagnostics.launch.py
Tests
The turtlebot4_tests packages contains the source code for the TurtleBot 4 system test scripts. These scripts test basic functionality of the robot and are useful for troubleshooting issues.
ROS Tests
The ROS tests use ROS topics and actions to test various system functionality. Test results are saved to ~/turtlebot4_test_results/Y_m_d-H_M_S where Y_m_d-H_M_S is the date and time of the test. A rosbag is also recorded for the duration of the test and saved to the same location.
Currently supported tests:
- Light Ring: Test the Create® 3 light ring
- Create® 3 Button: Test the Create® 3 buttons
- User LED: Test the HMI LEDs (TurtleBot 4 model only)
- User Button: Test the HMI buttons (TurtleBot 4 model only)
- Display: Test the HMI display (TurtleBot 4 model only)
- Dock: Test the robots ability to undock and dock.
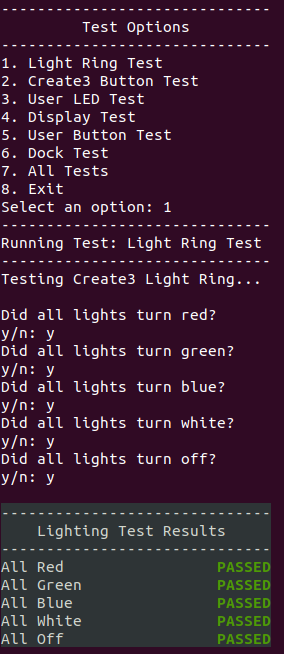
Running the tests:
ros2 run turtlebot4_tests ros_tests
This will launch a CLI menu where the different tests can be run.
Enter the index of the test and hit enter to start the test. Some tests will run automatically while others require user input.