Diagnostics
The TurtleBot 4 and TurtleBot 4 both run diagnostics updater and aggregator nodes by default. The updater records diagnostics data and the aggregator formats it so that it can be used with rqt_robot_monitor. This is a tool that can be used to monitor various robot topics to ensure that they are publishing data at the expected frequency.
To check that diagnostics are running properly, call
ros2 node list
You should see a node called turtlebot4_diagnostics. Additionally, calling
ros2 topic list
should list topics such as /diagnostics, /diagnostics_agg, and /diagnostics_toplevel_state. If diagnostics are not running, you can manually run them by calling
ros2 launch turtlebot4_diagnostics diagnostics.launch.py
Once diagnostics are running, you can view them with rqt_robot_monitor. Ensure that turtlebot4_desktop is installed on your PC, then call
ros2 launch turtlebot4_viz view_diagnostics.launch.py
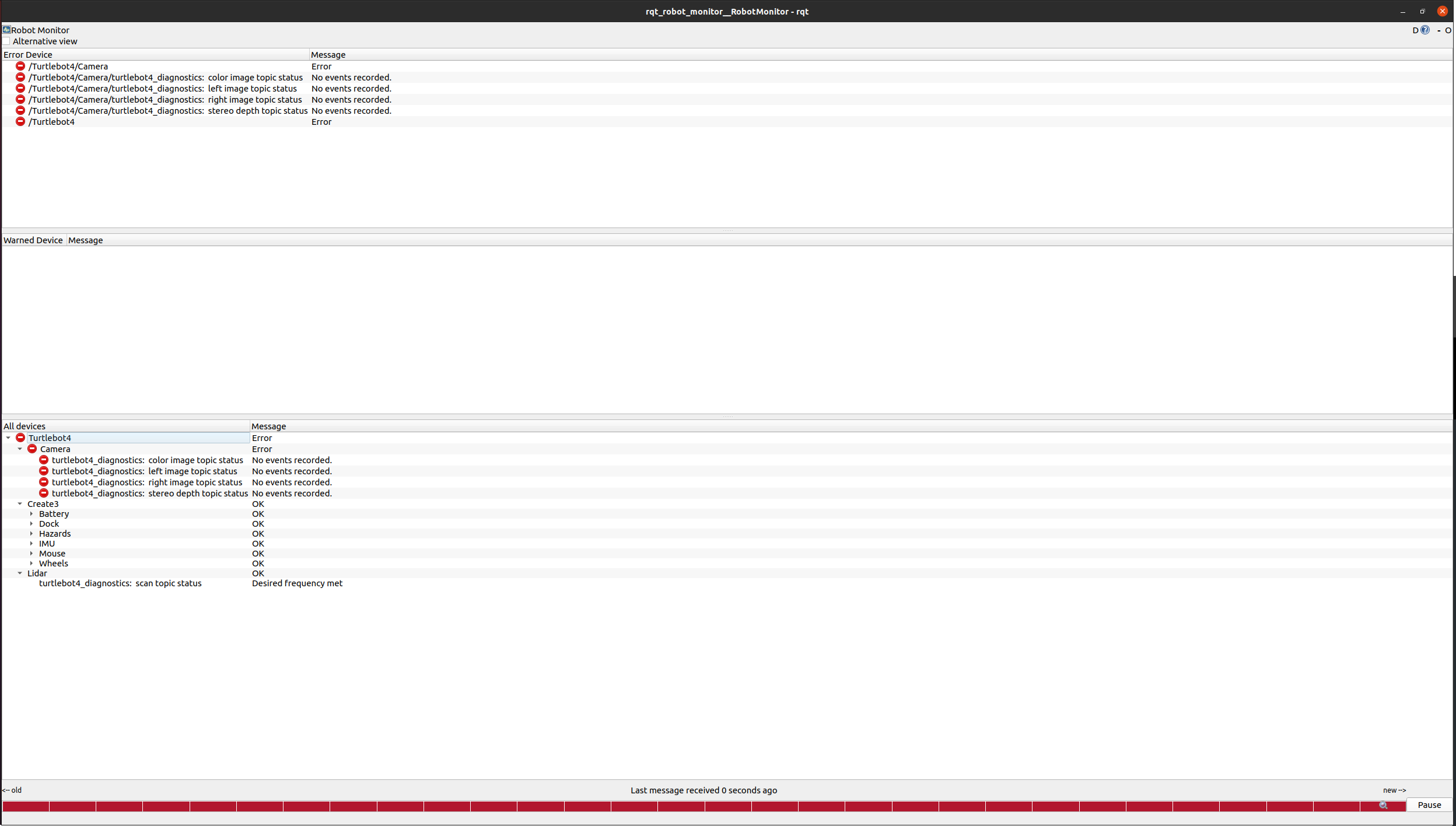
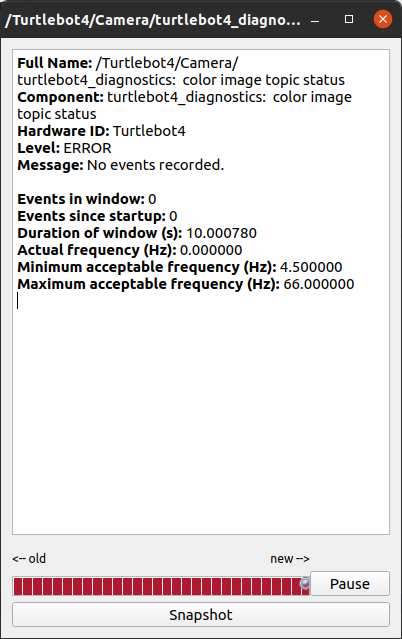
The monitor will display any errors in the first window, any warnings in the second window, and a summary of all topics in the "All devices" section at the bottom. Each topic has a status level of OK, WARNING, ERROR, or STALE. There is also a more detailed message included as well. You can click on each topic to view more information.
In this example, the OAK-D node is not running, so the camera topics are not being published.
Disabling Diagnostics
For systems experiencing high CPU usage issues or limited bandwidth, it can help to disable the diagnostics whenever they are not actively in use.
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
Instructions are not currently available for Galactic.
-
To disable diagnostics, SSH into your TurtleBot 4 and run the turtlebot4 setup tool:
turtlebot4-setupNavigate to ‘Bash Setup' in the ‘ROS Setup' menu, then change the
DIAGNOSTICSsetting toFalse.Save the settings, then apply settings in the main menu.
-
To disable diagnostics, SSH into your TurtleBot 4 and run the turtlebot4 setup tool:
turtlebot4-setupNavigate to ‘Bash Setup' in the ‘ROS Setup' menu, then change the
DIAGNOSTICSsetting toFalse.Save the settings, then apply settings in the main menu.