TurtleBot 4 Simulator
The turtlebot4_simulator metapackage contains packages used to simulate the TurtleBot 4 in Ignition Gazebo.
Source code is available here.
Installation
The recommended way to install the Turtlebot4 simulator is to install the debian metapackage, which is available on:
- Ubuntu 24.04 with ROS 2 Jazzy
- Ubuntu 22.04 with ROS 2 Humble
- Ubuntu 20.04 with ROS 2 Galactic end-of-life, not recommended
by running
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
sudo apt install ros-galactic-turtlebot4-simulator ros-galactic-irobot-create-nodes -
sudo apt install ros-humble-turtlebot4-simulator ros-humble-irobot-create-nodes -
sudo apt install ros-jazzy-turtlebot4-simulator ros-jazzy-irobot-create-nodes
For installation from source code, see below.
Dev Tools
Install useful development tools:
sudo apt install ros-dev-tools
Gazebo
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
Ignition Edifice must be installed:
sudo apt-get update && sudo apt-get install wget sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list' wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add - sudo apt-get update && sudo apt-get install ignition-edifice -
Ignition Fortress must be installed:
sudo apt-get update && sudo apt-get install wget sudo sh -c 'echo "deb http://packages.osrfoundation.org/gazebo/ubuntu-stable `lsb_release -cs` main" > /etc/apt/sources.list.d/gazebo-stable.list' wget http://packages.osrfoundation.org/gazebo.key -O - | sudo apt-key add - sudo apt-get update && sudo apt-get install ignition-fortress -
Gazebo Harmonic must be installed:
sudo apt-get install curl sudo curl https://packages.osrfoundation.org/gazebo.gpg --output /usr/share/keyrings/pkgs-osrf-archive-keyring.gpg echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/pkgs-osrf-archive-keyring.gpg] http://packages.osrfoundation.org/gazebo/ubuntu-stable $(lsb_release -cs) main" | sudo tee /etc/apt/sources.list.d/gazebo-stable.list > /dev/null sudo apt-get update sudo apt-get install gz-harmonic
Source installation
Source installation is an alternative to the debian package and should only be used if the debian package cannot be used or if modifications are being made to the source code.
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
To manually install this metapackage from source, clone the git repository:
cd ~/turtlebot4_ws/src git clone https://github.com/turtlebot/turtlebot4_simulator.git -b galacticInstall dependencies:
cd ~/turtlebot4_ws vcs import src < src/turtlebot4_simulator/dependencies.repos rosdep install --from-path src -yiBuild the packages:
source /opt/ros/galactic/setup.bash colcon build --symlink-installNext, the workspace must be sourced by running
source ~/turtlebot4_ws/install/setup.bashin the terminal or by adding that command in the.bashrcfile and sourcing the.bashrcfile. -
To manually install this metapackage from source, clone the git repository:
cd ~/turtlebot4_ws/src git clone https://github.com/turtlebot/turtlebot4_simulator.git -b humbleInstall dependencies:
cd ~/turtlebot4_ws rosdep install --from-path src -yiBuild the packages:
source /opt/ros/humble/setup.bash colcon build --symlink-installNext, the workspace must be sourced by running
source ~/turtlebot4_ws/install/setup.bashin the terminal or by adding that command in the.bashrcfile and sourcing the.bashrcfile. -
To manually install this metapackage from source, clone the git repository:
cd ~/turtlebot4_ws/src git clone https://github.com/turtlebot/turtlebot4_simulator.git -b jazzyInstall dependencies:
cd ~/turtlebot4_ws rosdep install --from-path src -yiBuild the packages:
source /opt/ros/jazzy/setup.bash colcon build --symlink-installNext, the workspace must be sourced by running
source ~/turtlebot4_ws/install/setup.bashin the terminal or by adding that command in the.bashrcfile and sourcing the.bashrcfile.
Networking
Any ROS 2 networking settings on the computer apply to all nodes launched including the simulation nodes. It is recommended to configure the computer for simple discovery prior to running any simulations. If the computer is on the same network as other ROS nodes unrelated to the simulation, then the LOCAL_HOST_ONLY environment variable should be set to True.
The simulation can be run in discovery server mode but the discovery server referenced must exist and be accessible for discovery as well as not having any conflicts in the topics launched.
Simulated robots and physical robots should not be combined in the same system.
Gazebo Bringup
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
The
turtlebot4_ignition_bringuppackage contains launch files and configurations to launch Ignition Gazebo.Launch files:
- Ignition: Launches Ignition Gazebo and all required nodes to run the simulation.
- ROS Ignition Bridge: Launches all of the required
ros_ign_bridgenodes to bridge Ignition topics with ROS topics. - TurtleBot 4 Nodes: Launches the
turtlebot4_nodeandturtlebot4_ignition_hmi_noderequired to control the HMI plugin and robot behaviour.
Ignition launch configuration options:
- model: Which TurtleBot 4 model to use.
- options: standard, lite
- default: standard
- rviz: Whether to launch rviz.
- options: true, false
- default: false
- slam: Whether to launch SLAM.
- options: off, sync, async
- default: off
- nav2: Whether to launch Nav2.
- options: true, false
- default: false
- param_file: Path to parameter file for
turtlebot4_node.- default: /path/to/turtlebot4_ignition_bringup/config/turtlebot4_node.yaml
- world: Which world to use for simulation.
- default: depot
- robot_name: What to name the spawned robot.
- default: turtlebot4
Running the simulator with default settings:
ros2 launch turtlebot4_ignition_bringup ignition.launch.pyRunning synchronous SLAM with Nav2:
ros2 launch turtlebot4_ignition_bringup ignition.launch.py slam:=sync nav2:=true rviz:=true -
The
turtlebot4_ignition_bringuppackage contains launch files and configurations to launch Ignition Gazebo.Launch files:
- Turtlebot 4 Ignition Launch: Launches Ignition Gazebo and all required nodes to run the simulation.
- Ignition: Launches Ignition Gazebo only.
- ROS Ignition Bridge: Launches all of the required
ros_ign_bridgenodes to bridge Ignition topics with ROS topics. - TurtleBot 4 Nodes: Launches the
turtlebot4_nodeandturtlebot4_ignition_hmi_noderequired to control the HMI plugin and robot behaviour.
Turtlebot 4 Ignition launch configuration options:
- model: Which TurtleBot 4 model to use
- options: standard, lite
- default: standard
- rviz: Whether to launch rviz
- options: true, false
- default: false
- localization: Whether to launch localization
- options: true, false
- default: false
- slam: Whether to launch SLAM
- options: true, false
- default: false
- nav2: Whether to launch Nav2
- options: true, false
- default: false
- world: Which world to use for simulation
- options: depot, maze, warehouse
- default: warehouse
- namespace: Optional robot namespace
- options: Any valid ROS 2 name as a string
- default: blank ("")
- x: x coordinate of the robot and dock spawn location in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
- y: y coordinate of the robot and dock spawn location in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
- z: z coordinate of the robot and dock spawn location in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
- yaw: robot and dock orientation at spawn in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
Running the simulator with default settings:
ros2 launch turtlebot4_ignition_bringup turtlebot4_ignition.launch.pyRunning synchronous SLAM with Nav2:
ros2 launch turtlebot4_ignition_bringup turtlebot4_ignition.launch.py slam:=true nav2:=true rviz:=true -
The
turtlebot4_gz_bringuppackage contains launch files and configurations to launch Gazebo.Launch files:
- Turtlebot 4 Gazebo Launch: Launches Gazebo and all required nodes to run the simulation.
- Gazebo: Launches Gazebo only.
- ROS Gazebo Bridge: Launches all of the required
ros_gz_bridgenodes to bridge Ignition topics with ROS topics. - TurtleBot 4 Nodes: Launches the
turtlebot4_nodeandturtlebot4_ignition_hmi_noderequired to control the HMI plugin and robot behaviour.
Turtlebot 4 Gazebo launch configuration options:
- model: Which TurtleBot 4 model to use
- options: standard, lite
- default: standard
- rviz: Whether to launch rviz
- options: true, false
- default: false
- localization: Whether to launch localization
- options: true, false
- default: false
- slam: Whether to launch SLAM
- options: true, false
- default: false
- nav2: Whether to launch Nav2
- options: true, false
- default: false
- world: Which world to use for simulation
- options: depot, maze, warehouse
- default: warehouse
- namespace: Optional robot namespace
- options: Any valid ROS 2 name as a string
- default: blank ("")
- x: x coordinate of the robot and dock spawn location in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
- y: y coordinate of the robot and dock spawn location in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
- z: z coordinate of the robot and dock spawn location in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
- yaw: robot and dock orientation at spawn in the gazebo world
- options: float representing a valid free location in the map
- default: 0.0
Running the simulator with default settings:
ros2 launch turtlebot4_gz_bringup turtlebot4_gz.launch.pyRunning synchronous SLAM with Nav2:
ros2 launch turtlebot4_gz_bringup turtlebot4_gz.launch.py slam:=true nav2:=true rviz:=true
Gazebo GUI Plugins
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
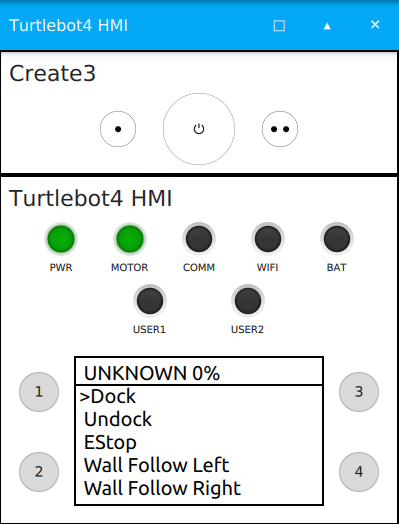
The
turtlebot4_ignition_gui_pluginspackage contains the source code for the TurtleBot 4 HMI GUI plugin.The TurtleBot 4 HMI GUI plugin is only used for the standard model. The lite model uses the Create® 3 HMI GUI plugin.
-
The
turtlebot4_ignition_gui_pluginspackage contains the source code for the TurtleBot 4 HMI GUI plugin.The TurtleBot 4 HMI GUI plugin is only used for the standard model. The lite model uses the Create® 3 HMI GUI plugin.
-
The
turtlebot4_gz_gui_pluginspackage contains the source code for the TurtleBot 4 HMI GUI plugin.The TurtleBot 4 HMI GUI plugin is only used for the standard model. The lite model uses the Create® 3 HMI GUI plugin.
Gazebo Toolbox
- Warning
ROS 2 Galactic is no longer supported. Please consider upgrading to a newer release
The
turtlebot4_ignition_toolboxpackage contains the source code for the TurtleBot 4 HMI node. The TurtleBot 4 HMI node acts as a bridge between theturtlebot4_nodeandros_ign_bridgeto convert the custom TurtleBot 4 messages into standard messages such asInt32andString. -
The
turtlebot4_ignition_toolboxpackage contains the source code for the TurtleBot 4 HMI node. The TurtleBot 4 HMI node acts as a bridge between theturtlebot4_nodeandros_ign_bridgeto convert the custom TurtleBot 4 messages into standard messages such asInt32andString. -
The
turtlebot4_gz_toolboxpackage contains the source code for the TurtleBot 4 HMI node. The TurtleBot 4 HMI node acts as a bridge between theturtlebot4_nodeandros_gz_bridgeto convert the custom TurtleBot 4 messages into standard messages such asInt32andString.