Rviz2
Rviz2 is a port of Rviz to ROS 2. It provides a graphical interface for users to view their robot, sensor data, maps, and more. It is installed by default with ROS 2 and requires a desktop version of Ubuntu to use. This means that it cannot be run on the robot which runs a server version of Ubuntu and does not have a display.
The Turtlebot4 Desktop package provides launch files and configurations for viewing the TurtleBot 4 in Rviz2.
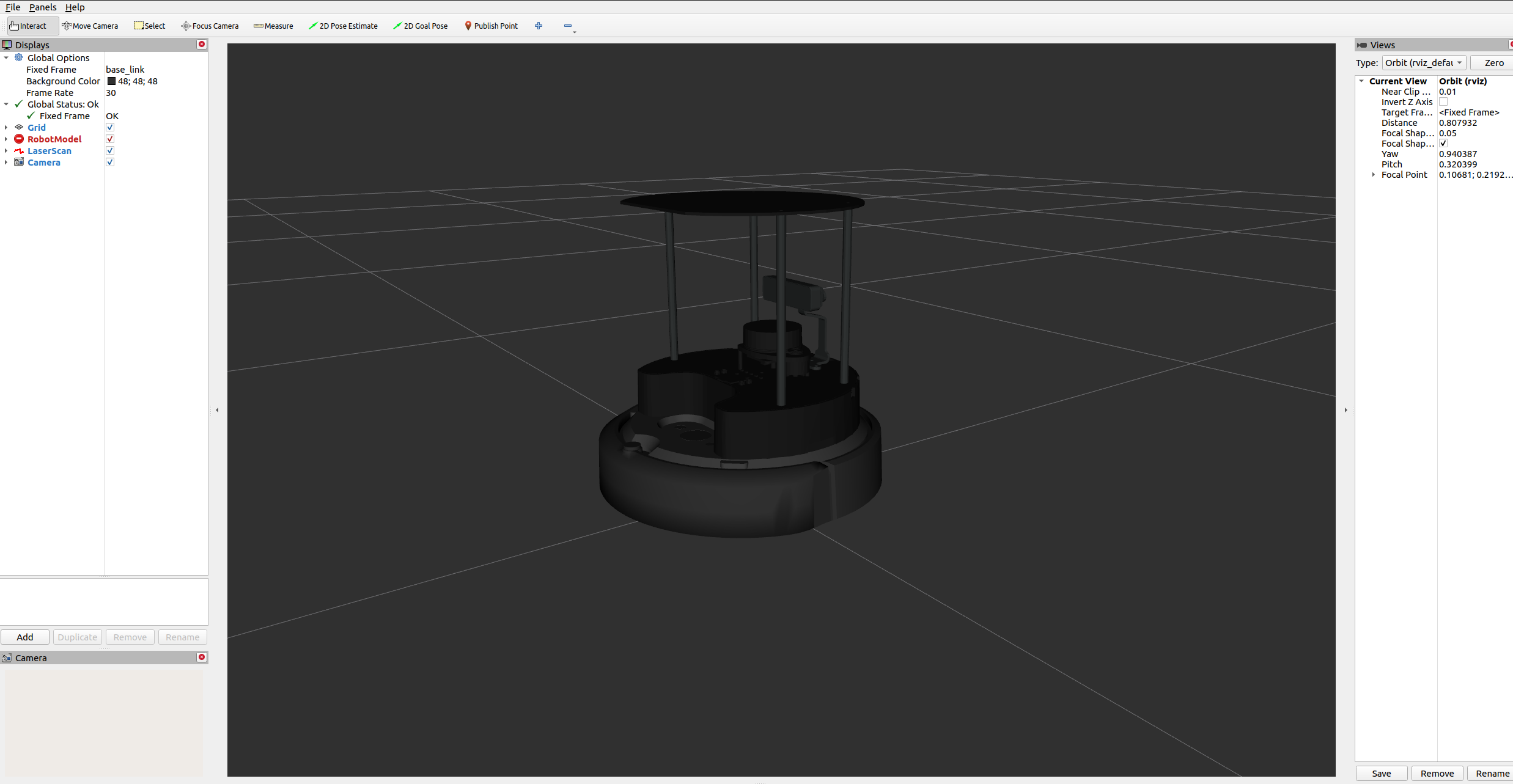
View Model
To inspect the model and sensor data, run:
ros2 launch turtlebot4_viz view_model.launch.py
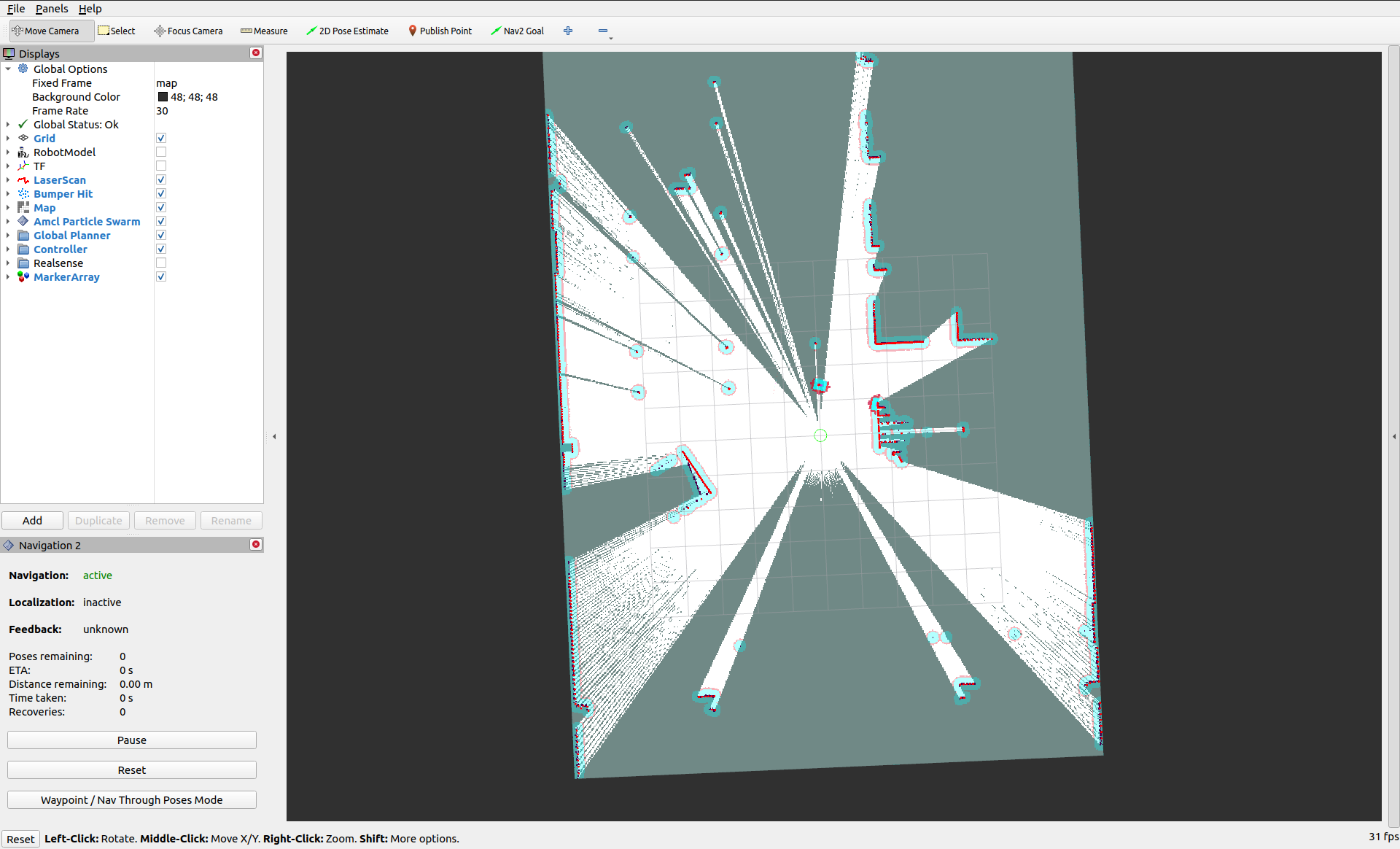
View Robot
For a top down view of the robot in its environment, run:
ros2 launch turtlebot4_viz view_robot.launch.py
This is useful when mapping or navigating with the robot
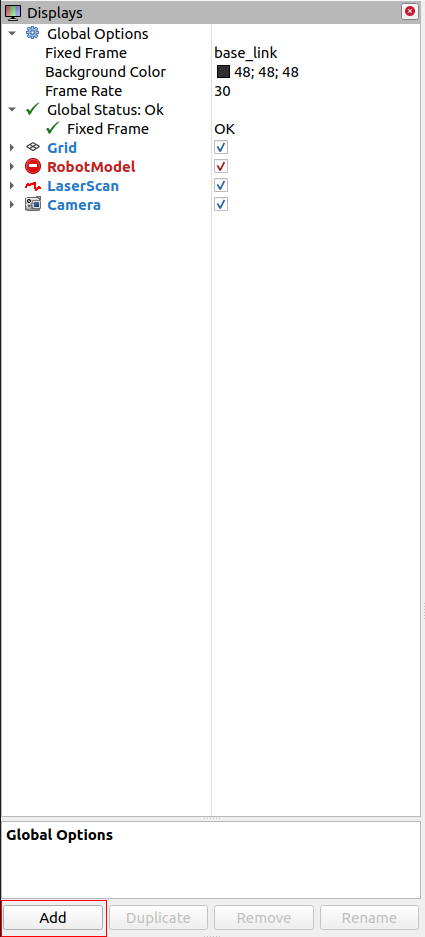
Rviz2 Displays
Rviz2 offers support for displaying data from various sources. Displays can be added using the "Add" button.
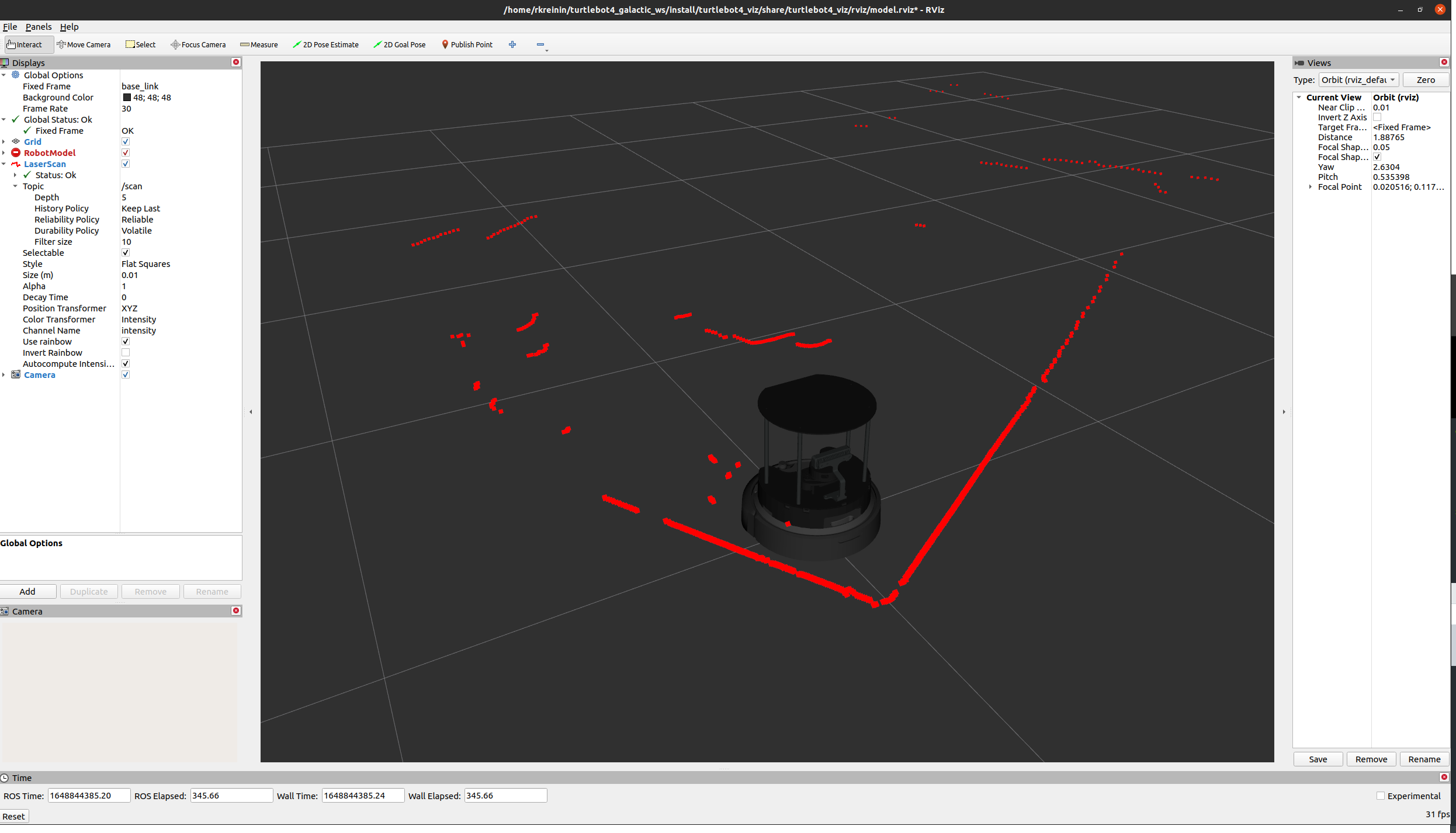
LaserScan
The LaserScan display shows data for sensor_msgs/msg/LaserScan messages. On the TurtleBot 4 the RPLIDAR supplies this data on the /scan topic.
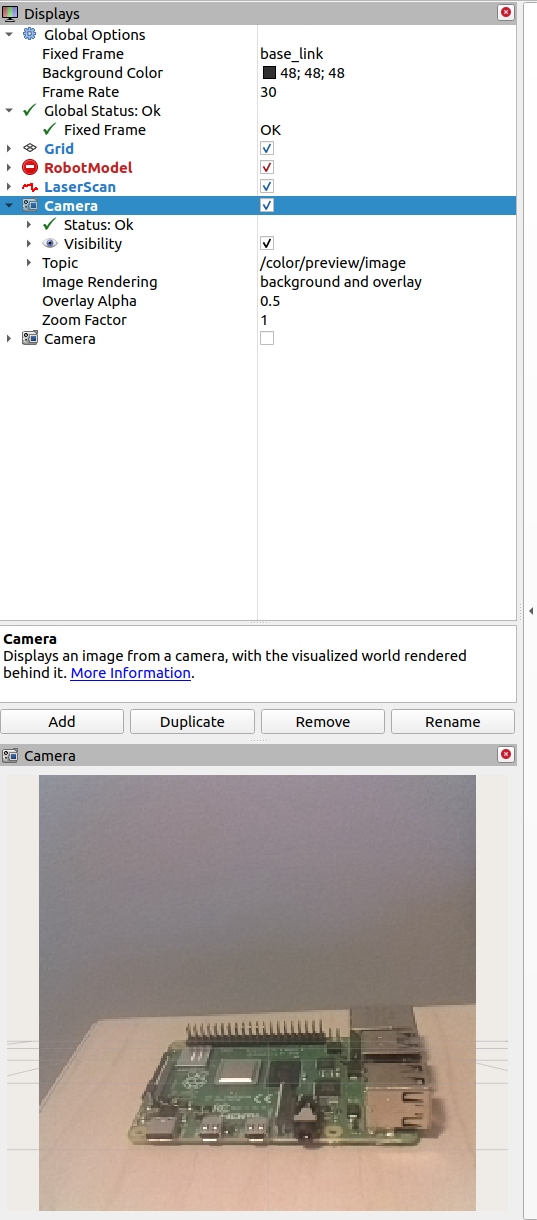
Camera
The Camera display shows camera images from sensor_msgs/msg/Image messages. The OAK-D cameras publish images on the /color/preview/image and /stereo/depth topics.
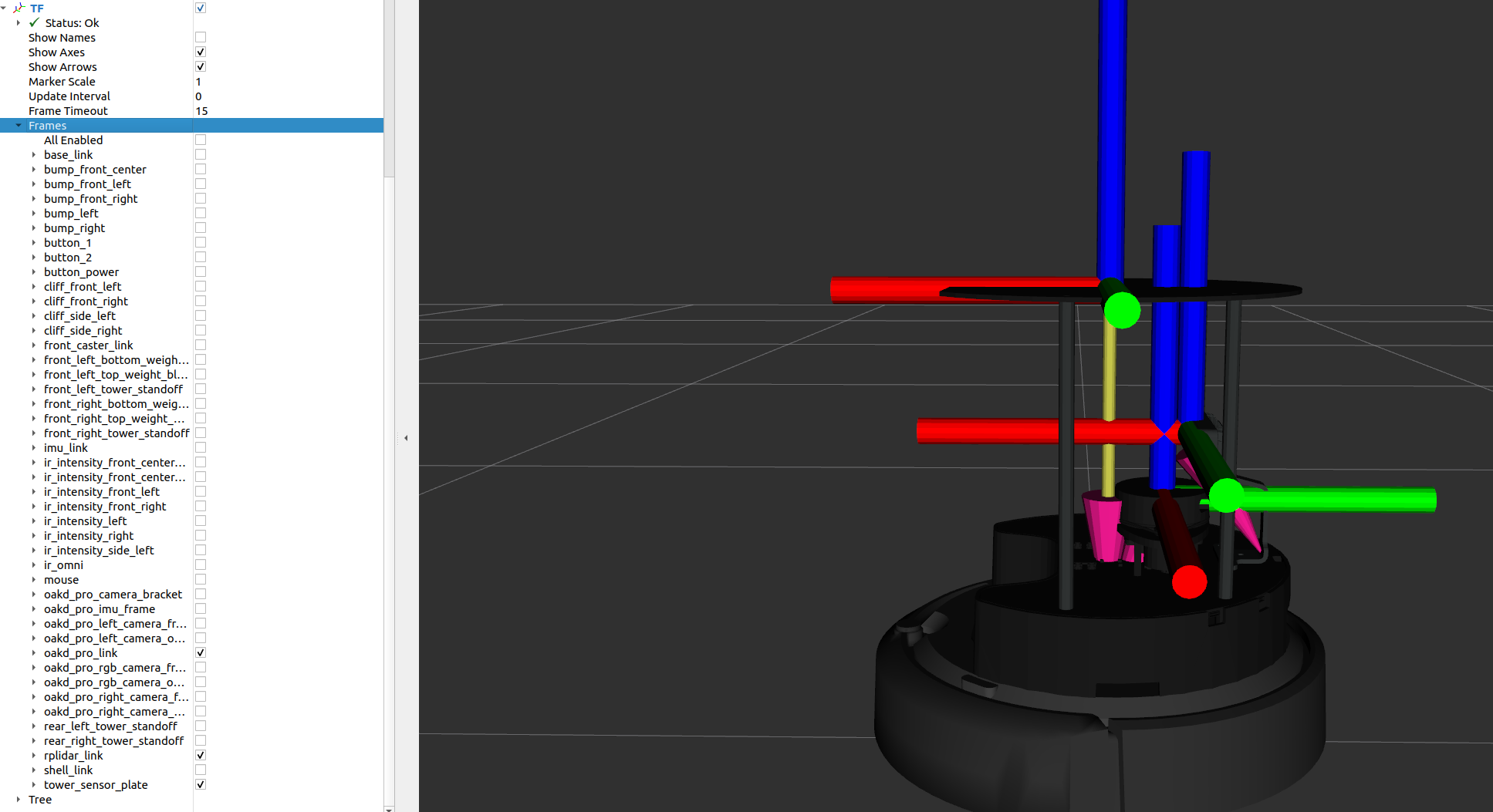
TF
The TF display can be used to visualise the links that make up the robot. When you first add the TF display, it will show every link that makes up the robot.
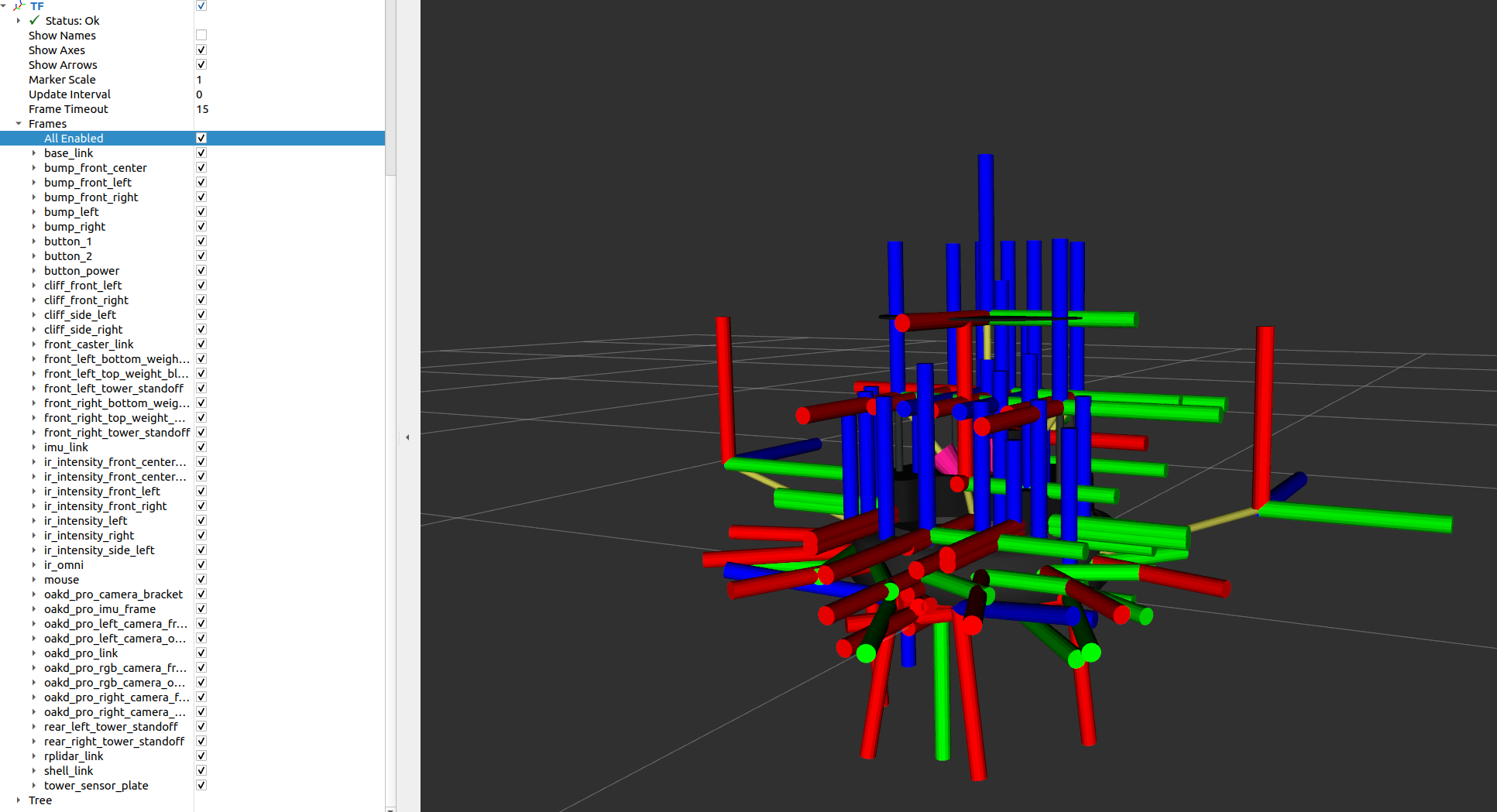
You can uncheck the "All Enabled" box, and then select the links you wish to see.